02 Building SpaDES modules
Alex M. Chubaty
April 16 2024
Source:vignettes/ii-modules.Rmd
ii-modules.RmdIntroduction
Module overview
Recall that SpaDES simulations are event-driven, meaning
that different actions are performed on data objects based on the order
of scheduled events. The central design of SpaDES promotes
modularity, such that collections of related simulation actions can be
grouped together as ‘modules’ and easily reused among multiple
simulations. Strict modularity requires that modules can act
independently, without needing to know about other modules. Thus each
SpaDES module must explicitly state its input dependencies
(data, package, and parameterization requirements), data outputs, as
well as provide other useful metadata and documentation for the user.
Upon initialization of a simulation via simInit, the
dependencies of every module used are examined and evaluated. If
dependency incompatibilities exists, the initialization fails and the
user is notified. Also during this initialization, module code is
source-ed into the simulation environment, making all
module objects and functions available during the simulation.
Each SpaDES module describes the processes or activities
that drive simulation state changes via changes to objects stored in the
simulation environment. Each activity consists of a collection of events
which are scheduled depending on the rules of the simulation. Each event
may evaluate or modify a simulation data object (e.g., update
the values on a raster map), or perform other operations such as saving
and loading data objects, plotting, or scheduling other events.
Simulation event list
The event queue is stored in a slot in a simList
simulation object. Each event is represented by a
data.table row consisting of the time the event is to occur
(eventTime), the name of the module from which the event is
taken (moduleName), and a character string for the
programmer-defined event type (eventType). This list is
kept sorted by eventTime, and events are processed in
sequence beginning at the top of the list. Completed events are removed
from the queue.
Module events
When a call to the event list is made, the event is processed by the
module specified by moduleName. The module code then
determines the event type and executes the code for that event. For each
event type within a module: 1) the instructions for what happens for
this event get executed; and 2) there is an optional call to
scheduleEvent, which schedules a future event. A module can
schedule other event types from within the same module, and should not
call other modules because this introduces module dependencies, which
breaks the drop-in/replace modularity of your simulation model.
Module event dependencies
Each module schedules its own events (e.g., a ‘fire’ module may schedule ‘burn’ events) and only uses its own data objects (or shared simulation objects). Modules that behave in this way are independent of one another, which is the preferred way to design and implement modules. Maintaining strict modularity allows the removal, addition, and replacement of modules without having to rewrite your code.
Module event dependencies complicate the construction of simulation models, and hinder the ability to develop and deploy models with modularity. If two modules are actually dependent on each others’ events, then you should consider whether they really are separate modules or should be merged into a single module.
Module structure
Module directory structure (moduleName/)
A module consists of a collection of files and folders that …
/moduleRepository
|_ moduleName/
|_ R/ # contains additional module R scripts
|_ data/ # directory for all included data
|_ CHECKSUMS.txt # contains checksums for data files
|_ tests/ # contains unit tests for module code
|_ citation.bib # bibtex citation for the module
|_ LICENSE.md # describes module's legal usage
|_ NEWS.md # log of changes made to module code
|_ README.md # symlink to rendered documentation file (moduleName.md)
|_ moduleName.R # module code file (incl. metadata)
|_ moduleName.Rmd # documentation, usage info, etc.
|_ moduleName_x.y.z.zip # zip archive of previous versionsModule code file (moduleName.R)
A SpaDES module consists of a single .R
source file, whose name matches the name of the module. This file
consists of three parts containing the code for:
- the metadata describing the module and its data dependencies;
- defining the event types described in the module;
- functions describing what happens during the processing of each event type.
Metadata
In order to interact correctly with one another in a simulation,
SpaDES modules are designed to be aware of their own
dependencies and to share this information with the simulation (and to
the user). During simulation initialization, the .R file
corresponding to each module used is parsed and the modules’ metadata
stored in the simList object inside the envir.
As part of this initialization step, the dependencies of each module are
extracted from the metadata and are checked against the other modules
used in the simulation to ensure that all dependencies can be
resolved.
Defining module metadata: defineModule()
Every module requires complete metadata, structured as a named list,
and passed as an argument to the defineModule function.
| Element name | Description |
|---|---|
name |
Name of the module as a character string. |
description |
Description of the module as a character string. |
keywords |
Character vector containing a module’s keywords. |
childModules |
Character vector containing the names of the child modules that are part of this module. |
authors |
The author(s) of the module as a person object. |
version |
The module version as a character, numeric, or
numeric_version. Semantic
versioning is assumed. |
spatialExtent |
Specifies the module’s spatial extent as an Extent
object. |
timeframe |
Specifies the valid timeframe for which the module was designed to simulate. |
Must be a POSIXt object of length 2,
specifying the start and end times. |
|
| (NOT YET FULLY IMPLEMENTED.) | |
timeunit |
Describes the unit of time corresponding to 1.0
simulation time units. |
citation |
A list of citations for the module, as a character strings. |
| Alternatively, the name of a or similar file. | |
documentation |
List of filenames referring to module documentation sources. |
reqdPkgs |
Character vector of R package names to be loaded. |
parameters |
A data.frame constructed using rbind with
defineParameter, specifying module |
parameters, with columns paramName,
paramClass, default, min,
max, and paramDesc. |
|
Default values may be overridden by the user by passing a list of
parameters to simInit. |
|
inputObjects |
A data.frame constructed using bindrows
with expectsInput, specifying |
the object dependencies of the module, with columns
objectName, objectClass, desc,
sourceURL and other specifications. |
|
| For objects that are used within the module as both an input and an output, | |
add an input object by using expectsInput. |
|
outputObjects |
A data.frame constructed using bindrows
with createsOutput, specifying |
the objects output by the module, with columns
objectName, objectClass, desc and
other specifications. |
|
Add an output object by using createsOutput. |
## sample module metadata for the default `caribouMovement` module
defineModule(sim, list(
name = "caribouMovement",
description = "Simulate caribou movement via correlated random walk.",
keywords = c("caribou", "individual based movement model", "correlated random walk"),
childModules = character(),
authors = c(person(c("Eliot", "J", "B"), "McIntire", email = "eliot.mcintire@nrcan-rncan.gc.ca",
role = c("aut", "cre"))),
version = list(caribouMovement = "1.6.1"),
spatialExtent = terra::ext(rep(0, 4)),
timeframe = as.POSIXlt(c(NA, NA)),
timeunit = "month",
citation = list(),
documentation = list(),
reqdPkgs = list("grid", "terra", "sf", "stats", "SpaDES.tools (>= 2.0.0)"),
parameters = rbind(
defineParameter("stackName", "character", "landscape", NA, NA, "name of the RasterStack"),
defineParameter("moveInitialTime", "numeric", start(sim) + 1, start(sim) + 1, end(sim),
"time to schedule first movement event"),
defineParameter("moveInterval", "numeric", 1.0, 1, 1,
"time interval between movoment events"),
defineParameter("N", "numeric", 100L, 10L, 1000L, "initial number of caribou"),
defineParameter("torus", "logical", FALSE, FALSE, TRUE,
"should the map wrap around like a torus?"),
defineParameter(".plots", "character", "screen", NA, NA,
"A modular mechanism to create plots, using png, screen device or other. See `?Plots`."),
defineParameter(".plotInitialTime", "numeric", start(sim), -Inf, Inf,
"time to schedule first plot event"),
defineParameter(".plotInterval", "numeric", 1, -Inf, Inf,
"time interval between plot events"),
defineParameter(".saveInitialTime", "numeric", NA_real_, -Inf, Inf,
"time to schedule first save event"),
defineParameter(".saveInterval", "numeric", NA_real_, -Inf, Inf,
"time interval between save events"),
defineParameter(".seed", "list", list(), NA, NA,
paste("Named list of seeds to use for each event (names).",
"E.g., `list('init' = 123)` will `set.seed(123)`",Defining module parameters: defineParameter()
Parameters here differ from input data objects in that the former are
intended to be variable across simulation runs, whereas the latter
remain constant. Parameters are often module-specific, where they are
only used within the module they are defined, although it may be useful
to globally define some parameters that are intended to be used by
multiple modules. Module-specific parameters are specified using
defineParameter (with rbind) within
defineModule to build a data.frame of input
parameters. Global parameters are defined at the simulation level as
part of the simInit call.
The parameter list in the simList object (accessed via
P or params) may be used to pass named
parameter values to modules. The general structure of this parameter
list is a nested list of lists: the top level list contains all module
names, each of those is a list of module parameters: This would normally
be accessed using the P: P(sim)$paramName if
inside a module, or P(mySim)$moduleName$moduleParameter if
not inside a module. This nested list structure allows passing as many
parameters as needed for your simulation. We suggest passing a list of
all the parameters needed for a single module together, but this is not
strictly necessary.
A module’s metadata defines default values for module-specific
parameters, and these defaults will be used unless overridden by the
user. Default parameter values can overridden by passing values in the
parameter list to simInit.
## Loading required package: quickPlot## Loading required package: reproducible##
## Attaching package: 'SpaDES.core'## The following objects are masked from 'package:stats':
##
## end, start## The following object is masked from 'package:utils':
##
## citation
outputDir <- file.path(tempdir(), "simOutputs")
times <- list(start = 0.0, end = 5.0)
parameters <- list(
.globals = list(stackName = "landscape", burnStats = "nPixelsBurned"),
.progress = list(NA),
randomLandscapes = list(nx = 100L, ny = 100L, inRAM = TRUE),
fireSpread = list(
nFires = 10L, spreadprob = 0.225, its = 1e6, persistprob = 0,
returnInterval = 10, startTime = 0,
.plotInitialTime = 0, .plotInterval = 10
),
caribouMovement = list(
N = 100L, moveInterval = 1, torus = TRUE,
.plotInitialTime = 1, .plotInterval = 1
)
)
modules <- list("randomLandscapes", "fireSpread", "caribouMovement")
objects <- list()
paths <- list(modulePath = getSampleModules(tempdir()),
outputPath = outputDir)
mySim <- simInit(times = times, params = parameters, modules = modules,
objects = objects, paths = paths)## Setting:
## options(
## spades.outputPath = '/tmp/Rtmpto4yQ7/simOutputs'
## spades.modulePath = '/tmp/Rtmpto4yQ7/sampleModules'
## )## Paths set to:
## options(
## rasterTmpDir = '/tmp/Rtmpto4yQ7/SpaDES/scratch/raster'
## reproducible.cachePath = '/tmp/Rtmpto4yQ7/reproducible/cache'
## spades.inputPath = '/tmp/Rtmpto4yQ7/SpaDES/inputs'
## spades.outputPath = '/tmp/Rtmpto4yQ7/simOutputs'
## spades.modulePath = '/tmp/Rtmpto4yQ7/sampleModules'
## spades.scratchPath = '/tmp/Rtmpto4yQ7/SpaDES/scratch'
## )
## terra::terraOptions(tempdir = '/tmp/Rtmpto4yQ7/SpaDES/scratch/terra'## Loading required package: RColorBrewer## Loading required package: terra## terra 1.7.71##
## Attaching package: 'terra'## The following object is masked from 'package:SpaDES.core':
##
## time<-## The following object is masked from 'package:MASS':
##
## area## The following object is masked from 'package:knitr':
##
## spin## The following object is masked from 'package:SpaDES.tools':
##
## wrap## Loading required package: grid##
## Attaching package: 'grid'## The following object is masked from 'package:terra':
##
## depth## Loading required package: sf## Linking to GEOS 3.12.1, GDAL 3.8.4, PROJ 9.3.1; sf_use_s2() is TRUE## Apr16 20:31:26 simInit Using setDTthreads(1). To change: 'options(spades.DTthreads = X)'.## Apr16 20:31:26 simInit The following .globals were used:## Apr16 20:31:26 simInit Key: <global, module>## Apr16 20:31:26 simInit module global## Apr16 20:31:26 simInit <char> <char>## Apr16 20:31:26 simInit 1: caribouMovement stackName## Apr16 20:31:26 simInit 2: fireSpread stackName## Apr16 20:31:26 simInit 3: randomLandscapes stackName## Elpsed time for simInit: 0.5515957 secs
## Access parameters
P(mySim) # shows all parameters
P(mySim, module = "caribouMovement") # only parameters in caribouMovement module
P(mySim)$caribouMovement # same
P(mySim)$caribouMovement$N # Only one parameter
## If used within the module source code, then module name can be omitted:
## This will return NULL here, but will return the actual value if used
## in a module
P(mySim)$N # Only one parameter if used within a moduleEvent types
Each module may contain an arbitrary number of event types. Each of
these event types are defined within the doEvent.moduleName
call, and are wrapped in a simple if/else
stanza that matches the called event type (NOTE: when several event
types are defined, switch/case can faster than
if/else). To keep the
doEvent.moduleName code block as clear and readable as
possible, keep the definitions of each event type minimal, using
functions (defined outside of the block) for the details of what is
happening for each event.
## sample event type definitions for the default `caribouMovement` module
)
))
## event types
doEvent.caribouMovement <- function(sim, eventTime, eventType, debug = FALSE) {
switch(
eventType,
init = {
### check for more detailed object dependencies:
### (use `checkObject` or similar)
checkObject(sim, name = Par$stackName, layer = "habitatQuality")
# do stuff for this event
sim <- Init(sim)
# schedule the next event
sim <- scheduleEvent(sim, Par$moveInitialTime,
"caribouMovement", "move")
sim <- scheduleEvent(sim, Par$.plotInitialTime,
"caribouMovement", "plot.init", .last())
sim <- scheduleEvent(sim, Par$.saveInitialTime,
"caribouMovement", "save", .last() + 1)
},
move = {
# do stuff for this event
sim <- Move(sim)
# schedule the next event
sim <- scheduleEvent(sim, time(sim) + Par$moveInterval, "caribouMovement", "move")
},
plot.init = {
# If this is scheduled because .plotInitialTime is not NA, it may not do anything
# if Par$.plots is not "screen", "png" or another type.
Plots(sim$caribou, addTo = paste("sim", Par$stackName, "habitatQuality", sep = "$"),
new = FALSE, size = 0.2, pch = 19, gp = gpar(cex = 0.6), usePlot = TRUE)
# schedule the next event
sim <- scheduleEvent(sim, time(sim) + Par$.plotInterval, "caribouMovement", "plot", .last())
},
plot = {
Plots(sim$caribou, new = FALSE, pch = 19, size = 0.1, gp = gpar(cex = 0.6),
usePlot = TRUE)
# schedule the next event
sim <- scheduleEvent(sim, time(sim) + Par$.plotInterval, "caribouMovement", "plot", .last())
},
save = {
# do stuff for this event
sim <- saveFiles(sim)
# schedule the next event
sim <- scheduleEvent(sim, time(sim) + Par$.saveInterval, "caribouMovement", "save", .last() + 1)
},
warning(paste(
"Undefined event type: \'", events(sim)[1, "eventType", with = FALSE],Event functions
Event functions should be defined below the
doEvent.moduleName code block and follow the naming
convention modulenameEventtype(). Keep these function
definitions as short and clean as possible (you can further modularize
your functions by calling additional subroutines).
Functions should get and return objects in the simulation environment
(envir), rather than pass them as function arguments. This
mostly allows for function definitions to be simpler, i.e.,
they just take the one sim argument if parameters are
passed within the simInit call. Accessing objects in the
envir is similar to accessing items in a list,
i.e., sim[["object"]] or sim$object
can be used, in addition to
get("object", envir=envir(sim)). Likewise, simulation
functions (i.e., those defined in modules) are also accessed
using the $ accessor (e.g.,
sim$myFunction()).
Note that every module requires an "init" event type,
which defines the initialization of the module; however, this
init event need not do a whole lot (i.e., it can
be a stub). As such, the Init() function is required for
initialization. Modules may also include "save" and
"plot" events, though these are optional.
## sample Init event function from the default `caribouMovement` module
}
## event functions
Init <- function(sim) {
yrange <- c(ymin(sim[[Par$stackName]]),
ymax(sim[[Par$stackName]]))
xrange <- c(xmin(sim[[Par$stackName]]),
xmax(sim[[Par$stackName]]))
# initialize caribou agents
N <- Par$N
IDs <- as.character(1:N)
sex <- sample(c("female", "male"), N, replace = TRUE)
age <- round(rnorm(N, mean = 8, sd = 3))
x1 <- rep(0, N)
y1 <- rep(0, N)
starts <- cbind(x = runif(N, xrange[1], xrange[2]),
y = runif(N, yrange[1], yrange[2]))
# create the caribou agent object
sim$caribou <- vect(cbind(starts, data.frame(IDs, x1, y1, sex, age)), geom = c("x", "y"))
return(invisible(sim))Event diagram
To better understand how events are scheduled within a simulation, a
visual representation called an eventDiagram illustrates
the sequences of events within a simulation.
Simulation time is presented on the x-axis, starting at date
startDate. Each module appears in a colour-coded row,
within which each event for that module is displayed corresponding to
the sequence of events for that module. Note that only the start time of
the event is meaningful is these figures: the width of the bar
associated with a particular module’s event corresponds to the module’s
timestep unit, not the event’s “duration”.
## agg_png
## 2Module documentation (moduleName.Rmd)
Module documentation should be written so that others can use your module. As such, this documentation should include a high-level overview of the module as well as low-level, detailed descriptions of its usage.
We strongly recommend using R Markdown (.Rmd) for this
documentation, as it is easily human-readable while also being
machine-readable and easily converted to a wide variety of file formats
including PDF, HTML, and DOCX.
Another benefit of using a text-based file format is to facilitate
transparent document versioning and history using version control
systems like git. For help writing in R Markdown, see https://rmarkdown.rstudio.com/.
Citation, LICENSE, and README files
citation.bibprovides aBibTeXformatted citation with which the module can be referenced. Most citation management software can read and output.bibformat.LICENSE.txtdescribes how your module can be redistributed and used by others. For help selecting a license, see choosealicense.com.README.mdis used to briefly document module metadata and version change information.
Data
All module data are located in the module’s data/
subdirectory. Also included in this folder is a
CHECKSUMS.txt file that contains the expected checksums for
each data file. Checksums can be verified (and optionally written) using
checksums().
## 1. specify your module here
moduleName <- "my_module"
## 2. use a temp dir to ensure all modules get fresh copies of the data
tmpdir <- file.path(tempdir(), "SpaDES_modules")
## 3. download your module's data to the temp dir
downloadData(moduleName, tmpdir)
## 4. initialize a dummy simulation to ensure any 'data prep' steps in the .inputObjects section are run
simInit(modules = moduleName)
## 5. recalculate your checksums and overwrite the file
checksums(moduleName, tmpdir, write = TRUE)
## 6. copy the new checksums file to your working module directory (the one not in the temp dir)
file.copy(from = file.path(tmpdir, moduleName, 'data', 'CHECKSUMS.txt'),
to = file.path('path/to/my/moduleDir', moduleName, 'data', 'CHECKSUMS.txt'),
overwrite = TRUE)Modules may require data that for various reasons cannot be
distributed with the module source code. In these cases, the module
developer should ensure that the module downloads and extracts the data
required. It is useful to not only check that the data files exist
locally but that their checksums match those expected (see
checksums()).
Versioned zip archives (moduleName_x.y.z.zip)
Use semantic versioning, such that
a version number x.y.z corresponds to:
-
xis the major version (incremented when you make incompatible API changes) -
yis the minor version (incremented when you add functionality in a backwards-compatible manner) -
zis the patch version (incremented when you make backwards-compatible bug fixes)
Passing data between modules
Modularity in SpaDES simulations is maintained by
ensuring modules interact indirectly with one another by reading in and
modifying objects in the simulation environment.
Data types
As you build your modules for your simulation, you can use any of
R’s data types to store your objects and data. In
particular, matrices (including vectors) and lists work well for this
purpose because, as of R version 3.1.0, they
are more efficient, reducing your model’s memory footprint and speeding
up your code’s execution. Other useful data types include
Raster* and SpatialPoints* objects (see
examples below).
Global objects and the simulation environment
R passes copies of objects to functions (instead of
using pass-by-reference), so the typical R function never
acts directly on the global copy of the variable. Within a function, all
operations are generally performed on a local copy of the object, which
is then either discarded or returned back to the parent environment upon
when the function completes. This object-copying behaviour has given
R a reputation of being slow in comparison to languages
like C and FORTRAN. However, recent
improvements to R have made it more memory efficient and
faster to execute, in part by minimizing the number of object copies
made and lazy loading.
One way SpaDES reduces object copying is by storing and
modifying objects in a simulation environment, because environments in R
have reference
semantics. Instead of storing simulation data in the global
environment, each SpaDES simulation uses a unique
environment wherein simulation data are referenced.
Module object dependencies
As noted above, modules should not depend on one another for event
scheduling. However, it is often useful to develop collections of
modules that interact indirectly and are dependent on shared data
objects. Modules can be designed to rely on outputs (data objects) from
other modules. When objects are shared between modules, it is important
to state these dependencies explicitly. To check whether objects upon
which a model depends exist, a call to checkObject is made
during module initialization.
Note that modules need not be inter-dependent on one another: module B may depend on module A (for example to initialize a data object), without module A depending on module B.
To view the dependencies for a simulation:
## NOTE: Suggested packages SpaDES.tools and NLMR packages must be installed
#install.packages("SpaDES.taols")
#install.packages("NLMR", repos = "https://predictiveecology.r-universe.dev/")
library(SpaDES.core)
times <- list(start = 0.0, end = 1.0)
parameters <- list(
.globals = list(stackName = "landscape", burnStats = "nPixelsBurned")
)
modules <- list("SpaDES_sampleModules")
paths <- list(modulePath = getSampleModules(tempdir()))
mySim <- simInit(times = times, params = parameters, modules = modules, paths = paths)
## examine simulation module (object) dependencies
depsEdgeList(mySim, FALSE) # all object dependency relationships## from to objName objClass
## <char> <char> <char> <char>
## 1: caribouMovement caribouMovement caribou SpatVector
## 2: fireSpread caribouMovement landscape SpatRaster
## 3: fireSpread fireSpread landscape SpatRaster
## 4: fireSpread fireSpread nPixelsBurned numeric
## 5: randomLandscapes caribouMovement landscape SpatRaster
## 6: randomLandscapes fireSpread landscape SpatRaster
moduleDiagram(mySim) # simplified visual representation of modules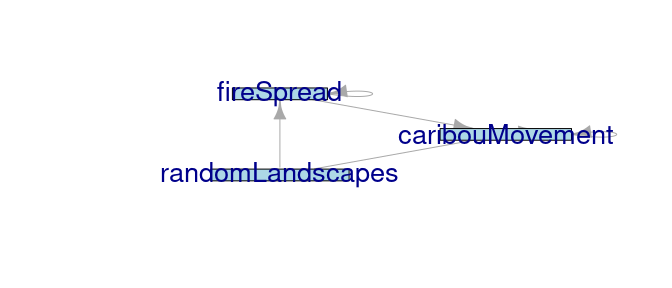

moduleDiagram(mySim, showParents = TRUE) # similar, but showing parent module grouping
# detailed visual representation of objects
objectDiagram(mySim, width = 720)The output of the depsEdgeList is an edgelist describing
the relationships between each module. In the example above, line 2 of
the output indicates that the fireSpread module relies on
an object landscape provided by the
caribouMovement module. This edgelist is used inside the
depsGraph function to produce a dependency graph (network),
where each module corresponds to a vertex (node), and object
dependencies are denoted by the arrows. When plotting the dependency
graph, it’s often useful to use the plot=TRUE argument to
simplify the network by showing no more than one object dependency
between modules.
Core modules
There are a number of built-in modules that provide useful
functionality such as plotting and saving. These modules have their
names prefaced with a dot (.). Parameter values for core
modules can be accessed by using their accessor methods; however, these
are simply entries in a nested list exactly like the parameters passed
to user modules, and can be accessed directly as such.
These core modules are summarized in the following table and described further below.
| Module Name | Parameterization | Accessor Methods |
|---|---|---|
.checkpoint |
file: character. |
checkpointFile() |
interval: numeric (or NA). |
checkpointInterval() |
|
.plot |
.plotInitialTime: numeric (or NA) |
as list item in your module parameters. |
.plotInterval: numeric (or NA) |
as list item in your module parameters. | |
.progress |
type: one of "text",
"graphical", |
progressType() |
"shiny", or NA. |
||
interval: numeric (or NA). |
progressInterval() |
|
.load |
inputs: data.frame |
inputs() or passed as inputs argument to
simList
|
.save |
outputs: data.frame |
outputs() or passed as outputs argument to
simList
|
.saveInitialTime: numeric (or NA) |
as list item in your module parameters. | |
.saveInterval: numeric (or NA) |
as list item in your module parameters. | |
.saveObjects: character. |
as list item in your module parameters. | |
.savePath: character. |
as list item in your module parameters. |
.checkpoint module
Schedule automatic simulation checkpointing to allow you to resume a
previously saved simulation. All objects in the global environment
including the state of the random number generator are saved and can be
reloaded. Checkpoint frequency and filename can be passed as parameters
to the simulation object as illustrated below. By default, checkpointing
is not used unless the interval parameter is provided; the
simulation checkpoint file (if one exists) is loaded if the
file parameter is specified.
# initialize a new simulation, setting the checkpoint interval and filename.
times <- list(start = 0, end = 5)
parameters <- list(
.globals = list(stackName = "landscape"),
.checkpoint = list(interval = 2, file = "chkpnt.RData")
)
modules <- list("randomLandscapes", "caribouMovement")
paths <- list(
modulePath = getSampleModules(tempdir())
)
mySim <- simInit(times = times, params = parameters, modules = modules, paths = paths)
# retrieve the checkpoint params from the simulation object
checkpointFile(mySim)## NULL
checkpointInterval(mySim)## [1] NA
.progress module
Schedule updates to the simulation progress bar.
# initialize a new simulation, setting the progress parameters
mySim <- simInit(times = list(start = 0.0, end = 10.0),
params = list(.globals = list(stackName = "landscape"),
.progress = list(type = "text", interval = 1)),
modules = list("randomLandscapes"),
paths = list(modulePath = getSampleModules(tempdir())))
# retrieve the checkpoint params from the simulation object
progressType(mySim)## [1] "text"
progressInterval(mySim)## [1] 1
.load and .save modules
Schedule object save and file load events by passing parameters to
the save and load parameters for each module. Saving objects to file can
be done at the module level or at the model level. At the module level,
each module can be provided with appropriate arguments as parameters. In
all cases, these must be events that are scheduled in the modules that
do the saving or loading, and then the parameters necessary to make
those events happen must be specified. Modules are not required to have
the following parameters set, but when using newModule() to
create the module, these will be events that are made, but not
scheduled:
| Argument | Description |
|---|---|
.saveInitialTime |
Numeric specifying the time at which the first save is scheduled
(between start(sim) and end(sim)). |
.saveInterval |
Numeric specifying the interval at which objects will be saved. |
| Used to schedule save events. | |
.saveObjects |
Character vector naming the objects to be saved. |
inputs argument to simInit
Alternatively, objects can be read in during the simInit
function call by passing a data.frame to the input
argument. For inputs(), the data.frame must
consist of, minimally, a column named file listing the
absolute or relative filepaths of the files to be loaded. Additional
columns can also be provided:
| Column Name | Description |
|---|---|
file |
Character string indicating the absolute or relative file path to individual file to load. |
objectName |
Character string indicating the name of the object once the file is loaded. |
fun |
Character string indicating the function to be used to load the
file. Can use package::fun notation. |
package |
Character string indicating the package to load the fun
from. Not required if fun uses package::fun
notation |
intervals |
Numeric indicating the interval between repeated loading of the same file. |
This should be NA or the column absent if the file is
only loaded once. |
|
loadTime |
Numeric indicating when the file should be loaded. Defaults to
simTime = 0, but this |
can be any time. The loading will be scheduled to occur at the
loadTime. |
|
| If the same file is to be loaded many times, but not at a regular interval, then there | |
should be separate line, with a unique loadTime for
each. |
|
args |
List of lists of named arguments; one list for each loading function. |
For example, if raster is a loading function,
args = list(native = TRUE). |
|
| If there is only one list, then it is assumed to apply to all load attempts and will be | |
| repeated for each load function. |
outputs argument to simInit
Objects to be saved can be specified using the output
argument, by passing a data.frame analogous to the .load
module. This data.frame is passed via the
outputs argument in the simInit call or via a
outputs(mySim) <- data.frame().
Saving files can be done “at the model level” by passing a simulation
parameter called outputs which can be a
data.frame and consists minimally of a column named
objectName. This will identify which objects should be
saved. Additional columns can also be provided:
| Column Name | Description |
|---|---|
objectName |
Character string indicating the name of the object once the file is loaded. |
file |
Character string indicating the base name to use to name the saved file. |
fun |
Character string indicating the function to be used to save the file. |
package |
Character string indicating the package to find the previous
fun in. |
saveTime |
Numeric indicating when the file should be saved. Defaults to
end(simList), but this can be any time. For multiple saves
of the same object, use unique lines, e.g., via
data.table(expand.grid(objectName = c("caribou", "veg"), saveTime = 1:10))
|
SpaDES will add a sixth column, saved, a logical, which
will become TRUE when (immediately following) the
successful save occurs.
Therefore, a call to outputs(mySim) will indicate which
objects have been saved.
There is partial string matching of these names, so if the
fun requires arguments to be passed to it, use
outputArgs(), and it must be the same length as the
outputs() data.frame.
# initialize a new simulation, setting the load and save parameters
outputDir <- file.path(tempdir(), "simOutputs")
mySim <- simInit(times = list(start = 0, end = 5),
params = list(
.globals = list(stackName = "landscape"),
randomLandscapes = list(
.saveInitialTime = 0, .saveInterval = 2,
.saveObjects = c("landscape"),
.savePath = file.path(outputDir, "randomLandscapes"))
),
modules = list("randomLandscapes"),
paths = list(modulePath = getSampleModules(tempdir()),
outputPath = outputDir),
outputs = data.frame(objectName = "landscape")
)
# retrieve the load and save params from the simulation object
inputs(mySim) # shows all files and objects that are "inputs"## [1] file fun package objectName loadTime loaded arguments
## [8] intervals
## <0 rows> (or 0-length row.names)
outputs(mySim) # shows all files and objects that are "outputs"## objectName file fun package
## 1 landscape /tmp/Rtmpto4yQ7/simOutputs/landscape_year5.rds saveRDS base
## saveTime saved arguments
## 1 5 NA NA
params(mySim)$randomLandscapes$.saveInitialTime## [1] 0
params(mySim)$randomLandscapes$.saveInterval## [1] 2
params(mySim)$randomLandscapes$.saveObjects## [1] "landscape"
params(mySim)$randomLandscapes$.savePath## [1] "/tmp/Rtmpto4yQ7/simOutputs/randomLandscapes"
ftmp <- tempfile(pattern = "spades_vignetteOutputs", fileext = ".pdf")
pdf(ftmp)
clearPlot()
mySim2 <- spades(mySim)
# More sophisticated, passing arguments to outputs()
outputs(mySim) <- data.frame(
objectName = "landscape", fun = "writeRaster", package = "terra",
saveTime = c(3,6), arguments = I(lapply(c(3,6), function(x) {
list(datatype = "FLT4S", filetype = "GTiff", overwrite = TRUE)
})))
mySim2 <- spades(mySim)## Warning in x@cpp$writeRaster(opt): GDAL Error 6:
## /tmp/Rtmpto4yQ7/simOutputs/landscape_year3.tif, band 1: SetColorTable() not
## supported for multi-sample TIFF files.## Warning: [writeRaster] change datatype to INT1U to write the color-table
## could not write the color table
dev.off()## agg_png
## 2
unlink(normalizePath(ftmp))Saving within a module – scheduling save events.
### WITHIN A MODULE:
# schedule a recurring save event
nextSave <- time(mySim) + params(mySim)$randomLandscapes$.saveInterval
sim <- scheduleEvent(mySim, nextSave, "randomLandscapes", "save")Plotting
Plotting events can be scheduled similarly to save events, by passing
module-specific parameters indicating when to schedule the first plot
event and how often to rescheduling recurring plot events. By default,
when a module is created with a newModule() call, plotting
will be scheduled using .plotInitialTime. The default is
NA, i.e., no plotting.
-
.plotInitialTime: The time at which the first plot is scheduled. -
.plotInterval: The interval at which objects will be plotted. Used to schedule plot events.
# initialize a new simulation, setting the load and save parameters
mySim <- simInit(times = list(start = 0, end = 5),
params = list(
.globals = list(stackName = "landscape"),
randomLandscapes = list(.plotInitialTime = 0, .plotInterval = 1)
),
modules = list("randomLandscapes"),
paths = list(modulePath = getSampleModules(tempdir()))
)
# retrieve the plotting params from the simulation object
params(mySim)$randomLandscapes$.plotInitialTime
params(mySim)$randomLandscapes$.plotInterval
### WITHIN A MODULE:
# schedule a recurring plot event
nextPlot <- time(mySim) + params(mySim)$randomLandscapes$.plotInterval
mySim <- scheduleEvent(mySim, nextPlot, "randomLandscapes", "save")Using existing SpaDES modules
One of the primary motivations of developing the SpaDES
package is to facilitate module reuse. We provide a few modules with
this package as samples for demos and the vignettes, which can be used
as a starting point for your own module development. We also maintain a
publicly accessible repository of SpaDES modules (details
below).
Before using other modules, it is up to the modeler (you!) to
understand the technical and scientific limitations of these modules.
Although SpaDES provides some built-in functionality to
ensure different modules will work together, and warn the user if
certain module combinations are invalid, when deciding upon which
modules to use, be sure to also:
- Ensure you are using a suitable
Rversion; - Check package dependencies and ensure you have the necessary packages installed on your system;
- Check module object dependencies (
simInitdoes this); - Check module compatibility (e.g., spatial extent,
timeframe, etc.) (
simInitonly does a basic version of this).
See the SpaDES wiki (https://github.com/PredictiveEcology/SpaDES/wiki)
for more detailed information on getting started.
Included sample modules
Use getSampleModules(tempdir()) to get the path to a
copy of the sampleModules directory. To view the contents
of a module, use the openModules function. Note that you
should not edit the sample modules directly, but save them as a copy in
another location.
openModules(getSampleModules(tempdir()), "moduleName")randomLandscapes: GenerateRasterStackof random maps representative of a forest landscape (DEM,forestAge,habitatQuality,percentPine). Requires a global simulation parameterstackNamebe set.fireSpread: Simulate fire ignition and spread on a landscape, where spread probability varies according to percent pine. Fire size statistics are collected immediately after each burn event. Requires a global simulation parameterstackNamebe set.caribouMovement: Agent based model of caribou movement via correlated random walk. Requires aRasterStackobject whose name is specified byglobals(sim)$stackName, containing aRasterLayernamedhabitatQuality.
SpaDES module repository
Website: https://github.com/PredictiveEcology/SpaDES-modules
Modules from this (or another suitable GitHub repository) can be downloaded using:
downloadModule("moduleName")Note: by default, modules and their data are saved
to the directory specified by the spades.modulesPath. An
alternate path can be provided to downloadModule directly
via the path argument, or specified using
options(spades.modulesPath = "path/to/my/modules").
Creating new modules
Module design considerations
As noted above, modules should function as independently as possible so that they retain their modularity. While it may be useful for modules to exhibit indirect dependence on each other via shared data objects (such as maps), modules should not depend directly on each other via event scheduling.
Using the module template
Code for new modules can be developed quickly using the template
generator function newModule(also available as an RStudio
add-in) which accepts as arguments the name of the new module, a
directory path in which to create the new module, and a logical
indicating whether to open the newly created module code file for
editing.
Module developers can set the devtools.desc.author
option (e.g., in their .Rprofile to automatically
supply a default module author). See package?devtools for
more details.
# create a new module called "randomLandscape" in the "custom-modules" subdirectory
# and open the resulting file immediately for editing.
newModule(name = "randomLandscapes", path = "custom-modules", open = TRUE)The newly created file can now be modified in the identified sections and customized to your module. However, it is very important that you do not edit portions of the file outside of the designated sections or your module may fail to work properly within a simulation.
Module groups
A ‘module group’ is simply a convenient way of specifying multiple
modules. Module groups are specified by naming child modules in the
defineModule block of the metadata. For example, the
SpaDES_sampleModules module group lists the following
modules as “children”:
caribouMovementfireSpreadrandomLandscapes
Module groups make loading multiple modules easier: only the name of
the module group needs to be specified in the simInit call,
which will then initialize the simulation with the child modules.
library(DiagrammeR)
library(SpaDES.core)
outputDir <- file.path(tempdir(), "simOutputs")
times <- list(start = 0.0, end = 20.0)
parameters <- list(
.globals = list(stackName = "landscape", burnStats = "nPixelsBurned"),
.progress = list(NA),
randomLandscapes = list(nx = 100L, ny = 100L, inRAM = TRUE),
fireSpread = list(
nFires = 10L, spreadprob = 0.225, its = 1e6, persistprob = 0,
returnInterval = 10, startTime = 0,
.plotInitialTime = 0, .plotInterval = 10
),
caribouMovement = list(
N = 100L, moveInterval = 1, torus = TRUE,
.plotInitialTime = 1, .plotInterval = 1
)
)
modules <- list("SpaDES_sampleModules")
objects <- list()
paths <- list(
modulePath = getSampleModules(tempdir()),
outputPath = outputDir
)
mySim <- simInit(times = times, params = parameters, modules = modules,
objects = objects, paths = paths)
modules(mySim) # note the child modules are initializedModule groups can also be used to simplify the download of multiple modules:
downloadModule("SpaDES_sampleModules")Debugging
Various debugging techniques are discussed at https://github.com/PredictiveEcology/SpaDES/wiki/Debugging.
Contributing modules
After publication you may wish to make your module more easily
accessible for others to use (in fact we encourage it). We maintain a
repository of SpaDES modules at the following site: https://github.com/PredictiveEcology/SpaDES-modules
Minimum requirements
All contributed modules should be well documented. In addition to
providing complete metadata within the module’s .R
file, the following components (see details above) should be
included:
- Complete module documentation, such as an R Markdown
(
.Rmd) document that can be built as aPDF. - A
citation.bibfile containing a BibTeX-formatted citation for your module (or for the publication describing your module). This citation will be used by others when citing your module. - A
LICENSEfile describing how your module code may be used and modified. - A
READMEfile containing an overview of your module and updates that are included with each version.
Note that newModule() produces skeleton templates of
these files. Additionally, zipModule() can be used to build
the .zip file corresponding to a particular version of your
module.
Module submission
To submit your module for inclusion in our GitHub repository, login to GitHub with your account and initiate a pull request to the repository. See the GitHub help documentation for more details.